Un collegamento a Z a barre migliorato per macchine da carico a ruote per la manovra di un'attrezzatura come una forchetta a benna oa pallet può includere bracci di sollevamento collegati in modo girevole tra un telaio finale della macchina e l'attrezzo, un giunto inclinato collegato girevolmente tra l'attrezzo e una leva di inclinazione che è collegato in modo girevole tra il telaio di inclinazione ei bracci di sollevamento. I cilindri di sollevamento possono ruotare i bracci di sollevamento per sollevare e abbassare l'attrezzo e un cilindro di inclinazione può azionare la leva di inclinazione e il collegamento dell'inclinazione per ruotare l'attrezzo tra una posizione di scarico e una posizione di traino. I rapporti delle lunghezze di questi elementi cinematici sono forniti in modo tale che la buona prestazione con un'apparecchiatura, come la benna, non provoca una scarsa prestazione con un'altra attuazione, ad esempio le forcelle a pallet.
CAMPO TECNICO
[0001]
Questa informativa si riferisce generalmente a macchine da carico a ruote girevoli e, in particolare, a raccordi a Z-bar per l'articolazione di utensili in tali macchine.
SFONDO
[0002]
Le macchine di caricamento delle ruote note nell'arte sono utilizzate per spostare materiale da un luogo all'altro in un cantiere. Queste macchine comprendono una parte del corpo che ospita il motore e che hanno ruote posteriori guidate dal motore e una cabina elevata per l'operatore. Un telaio anteriore non motorizzato con le ruote anteriori è fissato alla parte del corpo mediante una connessione articolata che consente di bloccare il telaio da lato a lato quando le ruote anteriori vengono ruotate per guidare la macchina. Il telaio finale comprende inoltre i collegamenti, quali i collegamenti a Z-bar, per la manipolazione di un'attrezzo della macchina. Una coppia di bracci di sollevamento accoppiati al telaio finale viene sollevata e abbassata da corrispondenti cilindri di sollevamento per regolare l'elevazione dell'attuatore al di sopra del terreno. Laddove vengono utilizzati i collegamenti a Z-bar, la tilt dell'attrezzo (rotazione dell'attuatore attorno ad una connessione pivot all'estremità dei bracci di sollevamento) è controllata da una leva di inclinazione e da un collegamento inclinato tra i bracci di sollevamento e l'attrezzo, da un cilindro inclinato. Un esempio di una macchina di caricamento a ruote che implementa un collegamento a Z-bar è fornito nella pubblicazione US 2006/0291987, pubblicata il 28 dicembre 2006.
[0003]
Le macchine di caricamento delle rotelle possono essere in grado di spostare diversi tipi di materiali a seconda delle esigenze del luogo di lavoro. Di conseguenza, le macchine sono progettate per manipolare diversi tipi di utensili. Un secchio può essere l'attrezzo appropriato per spostare i materiali considerati come materiali sciolti, come terra, argilla, sabbia e ghiaia. Quando si spostano i materiali sciolti da un mazzo ad un autocarro, per esempio, i bracci di sollevamento ei collegamenti di inclinazione vengono manipolati per posizionare il bordo di taglio del secchio parallelo al suolo e vicino alla parte inferiore del mazzo. Dopo che la benna scava nel mazzo, i ribaltamenti incrociano il secchio per raccogliere un carico massimo nel secchio e il secchio viene sollevato dal mucchio dai bracci di sollevamento per il trasporto del materiale al camion. Una volta lì, i collegamenti di inclinazione rimuovono il secchio e inclinano il secchio in avanti per scaricare il carico nel camion.
[0004]
Le forche di pallet possono essere un'apparecchiatura appropriata per altri tipi di materiali, come il carico palletizzato. Le forcelle possono anche essere adatte per sollevare carichi cilindrici come tubi fognari, pali telefonici e tronchi d'albero. Per questi tipi di carico utile, il racking completo dell'apparecchio può essere raramente necessario e in alcune applicazioni indesiderabili, ma mantenendo le forcelle parallele al suolo o inclinate leggermente verso l'alto quando i bracci di sollevamento vengono sollevati e abbassati possono essere vantaggiosi per impedire il carico da scivolando dalla parte anteriore delle forche. Ciò può verificarsi quando l'angolo di inclinazione delle forche diventa troppo basso e la macchina di caricamento della ruota si arresta all'improvviso. Altri tipi di utensili vengono utilizzati anche su macchine da carico e possono avere requisiti di movimento divergenti per lo spostamento del materiale per il quale sono stati progettati.
[0005]
In molte implementazioni, le macchine di caricamento delle rotelle sono configurate in modo che una varietà di attrezzi possa essere utilizzata in modo intercambiabile su un'unica macchina. In alcune implementazioni, un accoppiatore universale può essere collegato ai bracci di sollevamento e ai collegamenti inclinati. Gli utensili possono avere connettori corrispondenti che si accoppiano con l'accoppiatore per fissare l'attrezzo per l'uso. Come sopra discusso, ogni attuatore avrà diverse gamme di movimento quando si sposta i materiali per i quali sono stati progettati. In alcune situazioni, questi movimenti possono essere gratuiti, mentre in altre situazioni i moti potrebbero causare conflitti per le configurazioni dei bracci di sollevamento e dei collegamenti inclinati. Nella progettazione della macchina di caricamento della ruota, i requisiti di una determinata macchina portano la progettazione dei bracci di sollevamento e dei raccordi a Z per soddisfare le esigenze dei clienti destinatari. Le prestazioni di altri attrezzi possono essere soddisfatte per coincidenza, ma sono tipicamente compromesse a favore dell'applicazione di progettazione dominante. Pertanto, esiste una necessità per una progettazione della macchina a caricamento a ruote migliorata che implementa un collegamento a barra Z che fornisce la prestazione desiderata per due o più attrezzi, come secchi e forcelle, a scelta anziché caso.
RIASSUNTO DELLA DISCORGAZIONE
[0006]
In un aspetto della presente rivendicazione, l'invenzione è diretta a una macchina di caricamento a ruote che può includere un telaio finale, una coppia di bracci di sollevamento aventi le prime estremità collegate in modo girevole al telaio finale da perni A aventi un asse di rotazione comune e aventi secondo si estende contro le prime estremità, una coppia di cilindri di sollevamento aventi le prime estremità collegate girevolmente al telaio di estremità con i perni di rotazione Y aventi un asse rotante comune e le seconde estremità ciascuna collegate in modo girevole ad una corrispondente delle braccia di sollevamento mediante perni di snodo K aventi un comune in cui l'estensione dei cilindri di sollevamento fa sì che i bracci di sollevamento ruotino intorno ai perni A e spostino le due estremità delle braccia di sollevamento verso l'alto rispetto al suolo. La macchina di caricamento della ruota può anche comprendere un'apparecchiatura avente una porzione di impegno materiale e una porzione di accoppiamento, in cui le seconde estremità dei bracci di sollevamento sono girevolmente collegate all'attuatore prossimo ad un'estremità inferiore della porzione di accoppiamento
mediante perni di rotazione B aventi un asse rotante comune , una leva di inclinazione avente una prima estremità e una seconda estremità ed è collegata in modo girevole ai bracci di sollevamento in corrispondenza di un punto tra la prima e la seconda estremità della leva di inclinazione mediante un perno di rotazione F, un nodo di inclinazione avente una prima estremità collegata girevolmente a la seconda estremità della leva di inclinazione mediante un perno di rotazione D e una seconda estremità collegata girevolmente all'attuatore in prossimità di una estremità superiore della porzione di accoppiamento da un perno di perno C e un cilindro di inclinazione avente una prima estremità collegata girevolmente alla prima estremità la leva di inclinazione di un perno di rotazione E ed una seconda estremità collegata girevolmente al telaio finale da un perno di rotazione G, in cui l'estensione del cilindro di inclinazione provoca la leva di inclinazione e il collegamento di inclinazione per ruotare l'attrezzo sui perni di rotazione B verso un posizione racchiusa. La macchina di caricamento della ruota può avere un rapporto di una distanza DE tra i perni D e E ad una distanza EF tra i perni di rotazione E e F nell'intervallo 2,08-2,21.
[0007]
In un altro aspetto, l'invenzione è diretta a una macchina di caricamento a ruote con una disposizione di elementi cinematici come descritto nel paragrafo precedente e può avere un rapporto di una distanza DE tra i perni D e E ad un CD di distanza tra il perno i perni C e D nell'intervallo 1,44-1,59.
[0008]
In un altro aspetto, l'invenzione è diretta a una macchina di caricamento a ruote con una disposizione di elementi cinematici di cui al precedente paragrafo e può avere un rapporto di una distanza EF tra i perni di rotazione E e F ad una distanza DF tra il perno i perni D e F nell'intervallo 0,82-0,89.
[0009]
Ulteriori aspetti dell'invenzione sono definiti dalle rivendicazioni di questo brevetto.
BREVE DESCRIZIONE DEI DISEGNI
[0010]
FIGURA. 1 è una vista in elevazione laterale di una macchina di caricamento della ruota secondo la presente informativa;
[0011]
FIGURA. 2 è una vista schematica degli elementi cinematici che controllano il movimento degli attrezzi della macchina di caricamento della ruota di FIGURA. 1 ;
[0012]
FIGURA. 3 è una vista laterale parziale della macchina di caricamento della ruota di FIGURA. 1 in una serie di posizioni che sollevano un secchio appeso;
[0013]
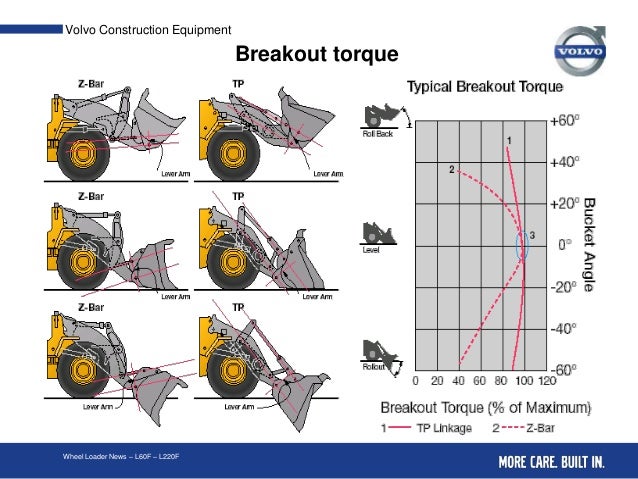
FIGURA. 4 è un grafico della variazione angolo del piano di sciopero della benna durante il sollevamento con curve per una realizzazione della macchina di carico della ruota FIGURA. 1 e due macchine di riferimento;
[0014]
FIGURA. 5 è una vista laterale parziale della macchina di caricamento della ruota di FIGURA. 1 con forche pallet in una serie di posizioni che sollevano le forche pallet da un orientamento orizzontale a livello del terreno;
[0015]
FIGURA. 6 è un grafico della modifica dell'angolo dell'attrezzo durante il sollevamento con curve per una realizzazione della macchina di caricamento della ruota di FIGURA. 1 e due macchine di riferimento;
[0016]
FIGURA. 7 è il grafico della punta della macchina, il rilascio del cilindro di inclinazione e le capacità di stallo del cilindro di sollevamento durante il sollevamento con curve per una forma di realizzazione della macchina di caricamento delle ruote FIGURA. 1 e una prima macchina di riferimento; e
[0017]
FIGURA. 8 è grafico del carico di ribaltamento, del rilascio del cilindro di inclinazione e delle capacità di stallo del cilindro di sollevamento durante il sollevamento con curve per una forma di realizzazione della macchina di caricamento delle ruote FIGURA. 1 e una seconda macchina di riferimento.
DESCRIZIONE DETTAGLIATA
[0018]
Sebbene il seguente testo illustri una descrizione dettagliata di numerose forme di realizzazione dell'invenzione, si deve comprendere che la portata giuridica dell'invenzione è definita dalle parole delle rivendicazioni esposte alla fine del presente brevetto. La descrizione dettagliata deve essere interpretata come solo esemplare e non descrive tutte le possibili realizzazioni dell'invenzione poiché la descrizione di ogni possibile forma di realizzazione sarebbe impraticabile, se non impossibile. Numerose forme di realizzazione alternative potrebbero essere implementate, utilizzando la tecnologia o la tecnologia corrente sviluppata dopo la data di deposito di questo brevetto, che rientrano comunque nell'ambito delle rivendicazioni che definiscono l'invenzione.
[0019]
Dovrebbe essere compreso anche che, a meno che un termine sia espressamente definito in questo brevetto utilizzando la frase "Come qui utilizzato, il termine" ______ "è definito a significare. . . "O una frase simile, non esiste alcun intento a limitare il significato di tale termine, espressamente o implicito, al di là del suo significato semplice e ordinario e tale termine non deve essere interpretato come limitato nel campo di applicazione in base a qualsiasi affermazione sezione del presente brevetto (diversa dalla lingua delle rivendicazioni). Nella misura in cui qualsiasi termine descritto nelle rivendicazioni alla fine di questo brevetto è menzionato in questo brevetto in modo coerente con un solo significato, ciò è fatto per chiarezza solo in modo da non confondere il lettore ed è non intende che tale termine di reclamo sia limitato, implicito o in altro modo, a quel singolo significato. Infine, a meno che non sia definito un elemento di richiesta recitando la parola "mezzi" e una funzione senza il considerando di una struttura, non si intende che l'ambito di qualsiasi elemento di richiesta sia interpretato in base all'applicazione di 35 USC §112, sesto comma
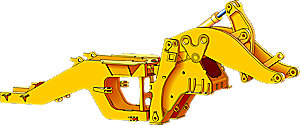
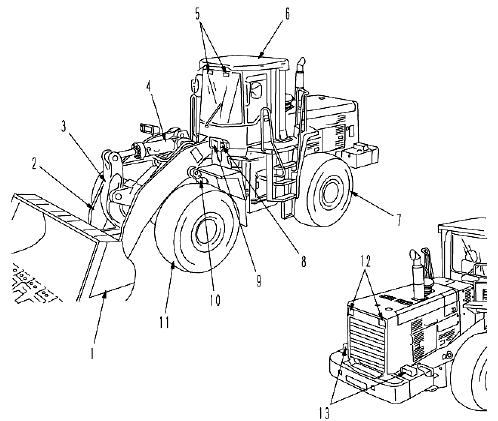
IGURA. 1 illustra una forma di realizzazione di una macchina 10 di caricatore a ruote secondo la presente informativa. La macchina di caricamento della ruota 10 include una porzione di carcassa 12 e un telaio di estremità non motorizzato 14 collegato da un giunto di articolazione 16 . La porzione 12 del corpo ospita un motore che guida le ruote posteriori 18 e comprende una cabina elevata 20 per l'operatore. Il telaio 14 presenta ruote anteriori 22 rivolte dal meccanismo di sterzo, con il giunto articolatore 16 che consente al telaio 14 di spostarsi da lato a lato per girare la macchina 10 di caricamento della ruota. Nella forma di realizzazione illustrata, un'apparecchiatura sotto forma di un secchio 24 è montata nella parte anteriore del telaio 14 su un accoppiatore 26 . Il secchio 24 e l'accoppiatore 26 possono essere configurati per il fissaggio sicuro del secchio 24 durante l'uso della macchina 10 di caricamento della ruota e per il rilascio del secchio 24 e la sostituzione di un'altra attuazione. Sebbene l'accoppiatore 26 e la benna 24 siano illustrati e descritti come componenti separabili separabili, i tecnici esperti dell'arte capiranno che ogni attrezzo, compreso il secchio, può essere configurato come un componente unitario avente una porzione di impegno materiale, come il secchio o le forcelle , e una porzione di accoppiamento avente i punti di attacco per collegare l'attrezzo alla macchina 10 .
[0021]
L'accoppiatore 26 è collegato al telaio 14 con una coppia di bracci di sollevamento 28 . Una estremità di ciascun braccio di sollevamento 28 è collegata girevolmente al telaio 14 e l'altra estremità è girevolmente collegata all'alimentatore 26 in prossimità del fondo. I bracci di sollevamento 28 ruotano intorno al punto di connessione al telaio 14 , con la rotazione dei bracci di sollevamento 28 controllati da corrispondenti cilindri di sollevamento 30 accoppiati girevolmente al telaio 14 e ai bracci di sollevamento 28 . I cilindri di sollevamento 30 possono essere estesi per sollevare i bracci di sollevamento 28 e ritirati per abbassare i bracci di sollevamento 28 . Nelle implementazioni tipiche sono previste due bracci di sollevamento 28 , ciascuna con un corrispondente cilindro di sollevamento 30 . Tuttavia, possono essere implementati un singolo braccio di sollevamento 28 e un cilindro di sollevamento 30 , due bracci di sollevamento 28 guidati da un singolo cilindro di sollevamento 30 o altri dispositivi di bracci di sollevamento 28 e cilindri di sollevamento 30 che forniscono funzionalità analoghe agli elementi cinematici e sono contemplati dal inventori come utilizzatori nelle macchine da carico a ruote in conformità alla presente informativa.
[0022]
La rotazione dell'alimentatore 26 e dell'apparecchiatura attaccata può essere controllata da un collegamento a barra Z del telaio 14 finale . Il collegamento a Z-bar può includere una leva di inclinazione 32 collegata in modo girevole ad un supporto di leva di inclinazione 34 montato sui bracci di sollevamento 28 in modo tale che il supporto di leva di inclinazione 34 si muove con i bracci di sollevamento 28 . Ad un'estremità della leva di inclinazione 32 , un anello di inclinazione 36 ha una estremità collegata girevolmente all'estremità della leva di inclinazione 32 e l'estremità opposta è collegata girevolmente all'alimentatore 26 in prossimità della parte superiore. Un cilindro di inclinazione 38 coppie l'estremità opposta della leva di inclinazione 32 al telaio 14 con i collegamenti pivotal ad entrambe le estremità. Per una determinata posizione dei bracci di sollevamento 28 , l'accoppiatore 26 e l'attrezzo vengono ruotati verso la posizione di estrazione estendendo il cilindro di inclinazione 38 e ruotando in senso opposto verso la posizione di distacco, richiamando il cilindro di inclinazione 38 .
[0023]
Viene mostrata la disposizione cinematica degli elementi che controllano il movimento dell'apparecchio FIGURA. 2 . Ognuna delle connessioni tra gli elementi che si muovono l'uno rispetto all'altro è fatta da un perno di perno intorno al quale gli elementi ruotano. Di conseguenza, i bracci di sollevamento 28 possono essere collegati al telaio 14 con i perni A e l'accoppiatore 26 mediante i perni di rotazione B. Il telaio di inclinazione 36 può essere collegato all'alimentatore 26 mediante un perno di rotazione C e la leva di inclinazione 32 da un perno di rotazione D. La leva di inclinazione 32 può essere collegata al cilindro di inclinazione 38 da un perno di rotazione E e dal supporto di leva di inclinazione 34 da un perno di rotazione F. L'estremità opposta del cilindro di inclinazione 38 può essere collegata all'estremità il telaio 14 da un perno di rotazione G. Infine, i cilindri di sollevamento 30 possono essere collegati ai bracci di sollevamento 28 mediante i perni K e al telaio 14 mediante i perni di rotazione Y. Poiché i perni A, G e Y sono collegati al 14 , la distanza tra i perni A, G, Y se è fisso.
[0024]
Nella discussione che segue, le lunghezze degli elementi saranno designate dai perni del perno. Con questa convenzione, i bracci di sollevamento 28 hanno una lunghezza AB, la leva di inclinazione 32 ha una lunghezza ED, il telaio di inclinazione 36 ha una lunghezza CD, l'accoppiatore 26 ha una lunghezza BC e così via. Le lunghezze EG e KY del cilindro di inclinazione 38 e dei cilindri di sollevamento 30 rispettivamente variano in quanto le barre corrispondenti vengono estese e ritirate per manovrare l'attrezzo. Come risulterà chiaro agli esperti del settore, con la lunghezza EG del cilindro inclinato 38 mantenuto costante, le posizioni della leva di inclinazione 32 , del telaio di inclinazione 36 e dell'accoppiatore 26 cambiano quando i bracci di sollevamento 28 vengono sollevati e abbassati a causa di la variazione della distanza tra i perni P e G.
[0025]
Le macchine di caricamento delle ruote 10 secondo la presente descrizione forniscono buone prestazioni per l'attrezzo della benna e sono accettabili per una buona prestazione per gli attrezzi a forcella a pallet. Le prestazioni sono raggiunte con combinazioni di lunghezze di collegamento che non sono state conosciute nelle precedenti macchine da carico a ruote gommate realizzando i collegamenti a Z-bar. In una forma di attuazione, la prestazione migliorata può essere ottenuta attraverso una combinazione di aumentare la lunghezza del collegamento 36 inclinato, spostando la posizione del perno di perno F più vicino al perno A, e spostando il perno di perno G più vicino e più direttamente sotto il perno A, tutto in rapporto alle lunghezze degli altri elementi cinematici. In un'altra forma di attuazione, simili prestazioni migliorate possono essere ottenute attraverso una combinazione di spostamento del perno di perno F più vicino al punto medio tra i perni D e E e spostando il perno di perno G più vicino e più direttamente sotto il perno A in relazione a le lunghezze degli altri elementi cinematici. Queste modifiche possono essere meglio illustrate confrontando vari rapporti di lunghezza degli elementi cinematici delle forme di realizzazione descritte in questo documento a quelle di precedenti accordi di collegamento. La tabella 1 elenca diversi rapporti di lunghezza per due legami di riferimento particolari, un intervallo di rapporti di lunghezza per i collegamenti di riferimento e una pluralità di collegamenti aggiuntivi di riferimento a Z e per due realizzazioni di giunzioni a Z-bar in conformità alla presente disclosure.

ttp://www.google.com/patents/US20120128456